Senter for presisjonsjordbruk ligger på NIBIO Apelsvoll ved Kapp i Østre Toten. Senteret ble etablert i 2016. Senterets formål er å bidra til et ressurseffektivt og bærekraftig jordbruk gjennom å gjøre vegen kortere fra ny teknologi utvikles til den kommer bonden til gode.
Hovedmålet med presisjonsjordbruk (PJ) er å optimere avlinger og kvalitet samtidig som en tar vare på naturmiljøet, slik at en oppnår både økonomiske og miljømessige fordeler.
Presisjonsjordbruk er en produksjonsstrategi som bygger på innsamling, bearbeiding og analyse av temporale, romlige og individspesifikke data. Denne informasjonen kombineres med annen kunnskap om produksjonssystemet for å styre tiltak etter den identifiserte variasjonen og oppnå bedre ressursutnyttelse, produktivitet, kvalitet, lønnsomhet og bærekraft. Presisjonsjordbruk handler altså om å bruke ny teknologi til å tilpasse behandlingen av jord og vekst etter behovet, som ofte varierer mye innenfor samme jordet.
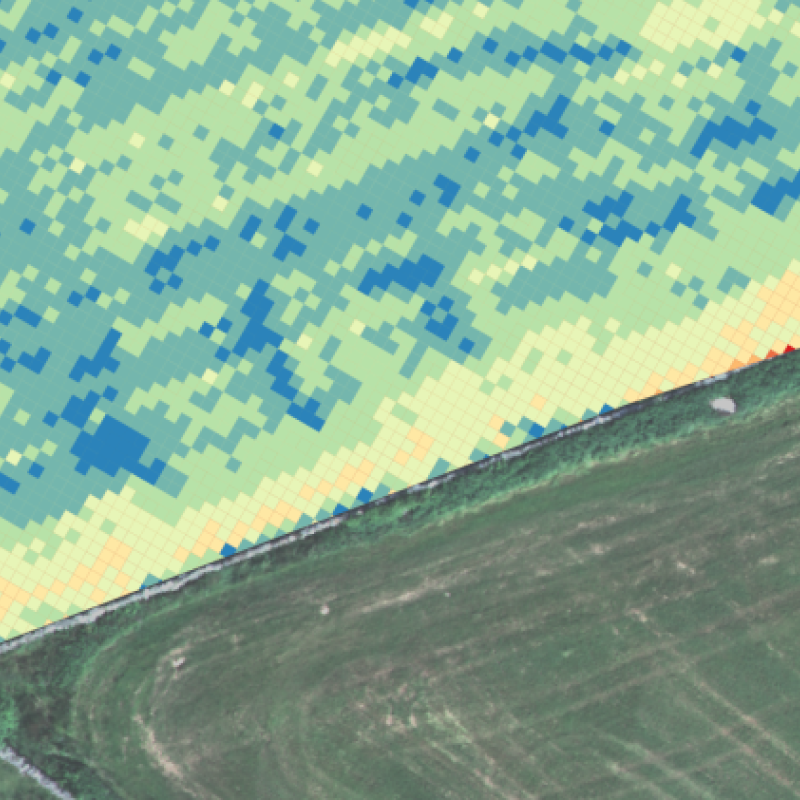
Tradisjonelt behandles hele jordet likt ut fra det en mener er riktig i gjennomsnitt. Ved presisjonsjordbruk tilpasses for eksempel gjødselmengden, sprøytemengden og kalkmengden ut fra det stedsspesifikke behovet. Dette behovet kartlegges ved å sette sammen informasjon fra mange kilder, der ulike sensorer, kamera og globale navigasjonssystemer (GNSS) spiller en sentral rolle. Slikt utstyr kan monteres på for eksempel traktorer, roboter, droner eller satellitter.
Hva jobber vi med på senteret?
Vårt team av forskere og ingeniører ved Senter for presisjonsjordbruk arbeider med å utvikle ny teknologi og metodikk knyttet til blant annet fjernanalyse av planteegenskaper, automatisering av ulike agronomiske prosesser og formidling av data og metoder.
Vi forsker på vekster som korn, bær, eng og poteter og utvikler metoder for å ekstrahere informasjon om plantenes nitrogeninnhold, vannstatus og helsesituasjon. Videre utvikler vi modeller for å prognostisere avlinger og produktkvalitet relativt tidlig i vekstsesongen.
Vi utvikler og tester teknologiske løsninger både for dagens og framtidas presisjonsjordbruk.
Vi samarbeider med både nasjonale og internasjonale aktører som sammen dekker et vidt spenn – fra sluttbrukere via sentrale markedsaktører i landbruket til teknologibedrifter. I tillegg har vi et utstrakt samarbeid med forskningsmiljøer over hele verden.
Denne rapporten gir en oversikt over de nyeste teknologiene innen sensorer for overvåking av vekstforhold og planteresponser. Vi ser på teknologiske trender, praktiske bruksområder, databehandling og fremtidige retninger, med særlig relevans for norsk hagebruk og forskningsmiljøer.
Today’s modern precision agriculture applications have a huge demand for data with high spatial and temporal resolution. This leads to the need of unmanned aerial vehicles (UAV) as sensor platforms providing both, easy use and a high area coverage. This study shows the successful development of a prototype hybrid UAV for practical applications in precision agriculture. The UAV consists of an off-the-shelf fixed-wing fuselage, which has been enhanced with multi-rotor functionality. It was programmed to perform pre-defined waypoint missions completely autonomously, including vertical take-off, horizontal flight, and vertical landing. The UAV was tested for its return-to-home (RTH) accuracy, power consumption and general flight performance at different wind speeds. The RTH accuracy was 43.7 cm in average, with a root-mean-square error of 39.9 cm. The power consumption raised with an increase in wind speed. An extrapolation of the analysed power consumption to conditions without wind resulted in an estimated 40 km travel range, when we assumed a 25 % safety margin of remaining battery capacity. This translates to a maximal area coverage of 300 ha for a scenario with 18 m/s airspeed, 50 minutes flight time, 120 m AGL altitude, and a desired 70 % of image side-lap and 85 % forward-lap. The ground sample distance with an in-built RGB camera was 3.5 cm, which we consider sufficient for farm-scale mapping missions for most precision agriculture applications.