Presisjonsplantevern
.jpg?quality=60)
Foto: Morten Günther/NIBIO
Integrert plantevern (Integrated Pest Management; IPM) er å ta i bruk alle teknikker og metoder som lar seg forene for å holde mengden planteskadegjørere (f.eks. ugras, skadedyr og plantesykdommer) under det nivået som gir økonomisk skade. Bruk av ny teknologi som åpner for steds-spesifikk bekjempelse er et sentralt prinsipp i IPM, og en del av vår forskning. Vi har jobbet over et vidt spenn som går fra mekanisk ugrasbekjempelse ved bruk av sensor-styrt radrensing og ugrasharving til punktsprøyting av ugras ved hjelp av kamera montert på åkersprøyte, bakkegående robot og drone.
Ved bruk av data og teknologi for å påføre plantevernmidler eller ikke-kjemiske planteverntiltak kun der det er nødvendig kan mengden plantevernmidler reduseres.
For å få til dette trengs sensor-baserte systemer som kan identifisere planteskadegjører eller deres symptomer i kombinasjon med validerte data-basert beslutningsmodeller, geografiske informasjonssystemer, og avansert utstyr for nøyaktig og presis gjennomføring av bekjempelsestiltak.
Presisjonsplantevern kan bidra til redusert bruk av plantevernmidler og mindre forurensning av jord og vann og redusere utgiftene for gårdbrukeren samtidig som avlingsmengde- og kvalitet opprettholdes.
Dyptgående kunnskap om agronomi og planteskadegjørere er nødvendig for å kunne utvikle og benytte ny teknologi innen området. Med vår kombinasjon av forskere på planter, plantehelse og teknologi er vi godt rustet til å jobbe med et bredt spekter av prosjekter innen presisjonsplantevern.
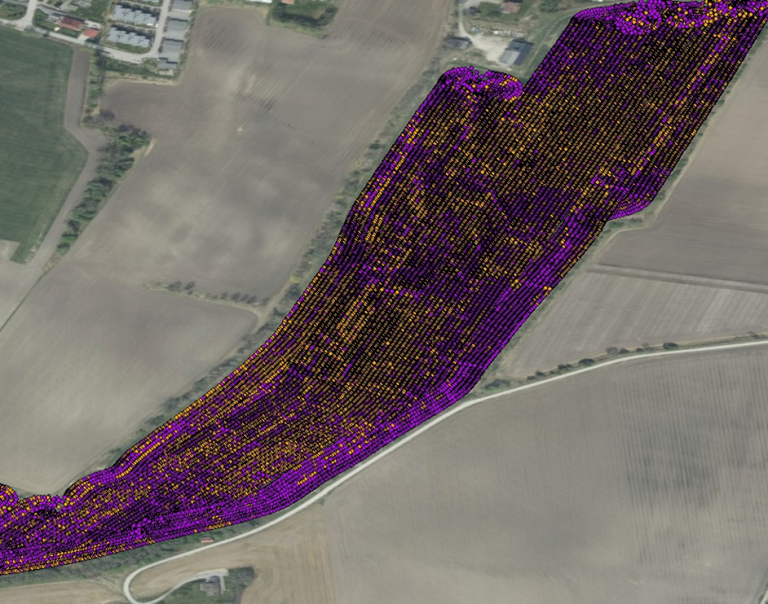
Illustrasjon: Therese W. Berge
KONTAKTPERSON

Therese With Berge
Forsker
-
Divisjon for bioteknologi og plantehelse
(+47) 922 93 927 therese.berge@nibio.no Kontorsted: Ås - Bygg H7

Jiangsan Zhao
Forsker
-
Divisjon for matproduksjon og samfunn
(+47) 413 23 321 jiangsan.zhao@nibio.no Kontorsted: Apelsvoll
KONTAKTPERSON
Therese With Berge
Forsker
-
Divisjon for bioteknologi og plantehelse
(+47) 922 93 927 therese.berge@nibio.no Kontorsted: Ås - Bygg H7
Jiangsan Zhao
Forsker
-
Divisjon for matproduksjon og samfunn
(+47) 413 23 321 jiangsan.zhao@nibio.no Kontorsted: Apelsvoll
Publikasjoner
Forfattere
Sonja I. Kimmel Matthias Schumacher Michael Spaeth Markus Sökefeld Oyebanji O. Alagbo Alicia Allmendinger Dionisio Andujar Therese With Berge Reiner Braun Sergiu Cioca Parasca Jessica Emminghaus Ioannis Glykos Pavel Hamouz Adam Hruška Michael Merkle Georg Naruhn Gerassimos G. Peteinatos Bahadir Sin Roland GerhardsSammendrag
Effective weed management is crucial in the critical period of sugar beet production, but often lacks sustainability and environmental protection. Recent advancements in sensor-based weed control systems have rendered the latter a realistic prospect, which demands detailed analyses, especially under suboptimal field conditions. The present study analysed six robotic-assisted weed control systems (RAWS) in three experiments on sugar beets in 2024, conducted under dry soil and high weed pressure. The experiments included sensor-based inter-row and intra-row hoeing, spot- and band-spraying and were compared to a broadcast herbicide treatment and an untreated control. Weed control efficacy (WCE) in the intra- and inter-row areas, as well as weed species composition and crop plant damage, were assessed after treatment. The data show that intra-row WCE of two hoeing robots (Farming GT® and Robovator®) equipped with selective intra-row blades achieved up to 80%, which was higher than the broadcast herbicide control with 67% WCE. In the inter-row area, Farming GT® robotic hoeing and ARA® spot-spraying resulted in more than 90% WCE, which was equal to the broadcast herbicide application. Weed species composition was not affected by the different RAWS. Crop plants were affected by all hoeing treatments with maximum non-lethal burial rates of 33%. The highest lethal uprooting of crop plants occurred after Farming GT® robotic hoeing, at 5.5% overall. The results demonstrate the great potential of robotic weeding to replace broadcast herbicide applications.
Forfattere
Therese With BergeSammendrag
Det er ikke registrert sammendrag
Forfattere
Ingeborg Klingen Nils Bjugstad Therese With Berge Krzysztof Kusnierek Hans Wilhelm Wedel-Jarlsberg Roger Holten Anette Sundbye Lene Sigsgaard Håvard Eikemo Kirsten Tørresen Valborg KvakkestadSammendrag
Det er ikke registrert sammendrag
Sammendrag
Det er ikke registrert sammendrag
Sammendrag
Weeds affect crop yield and quality due to competition for resources. In order to reduce the risk of yield losses due to weeds, herbicides or non-chemical measures are applied. Weeds, especially creeping perennial species, are generally distributed in patches within arable fields. Hence, instead of applying control measures uniformly, precision weeding or site-specific weed management (SSWM) is highly recommended. Unmanned aerial vehicle (UAV) imaging is known for wide area coverage and flexible operation frequency, making it a potential solution to generate weed maps at a reasonable cost. Efficient weed mapping algorithms need to be developed together with UAV imagery to facilitate SSWM. Different machine learning (ML) approaches have been developed for image-based weed mapping, either classical ML models or the more up-to-date deep learning (DL) models taking full advantage of parallel computation on a GPU (graphics processing unit). Attention-based transformer DL models, which have seen a recent boom, are expected to overtake classical convolutional neural network (CNN) DL models. This inspired us to develop a transformer DL model for segmenting weeds, cereal crops, and ‘other’ in low-resolution RGB UAV imagery (about 33 mm ground sampling distance, g.s.d.) captured after the cereal crop had turned yellow. Images were acquired during three years in 15 fields with three cereal species (Triticum aestivum, Hordeum vulgare, and Avena sativa) and various weed flora dominated by creeping perennials (mainly Cirsium arvense and Elymus repens). The performance of our transformer model, 1Dtransformer, was evaluated through comparison with a classical DL model, 1DCNN, and two classical ML methods, i.e., random forest (RF) and k-nearest neighbor (KNN). The transformer model showed the best performance with an overall accuracy of 98.694% on pixels set aside for validation. It also agreed best and relatively well with ground reference data on total weed coverage, R2 = 0.598. In this study, we showed the outstanding performance and robustness of a 1Dtransformer model for weed mapping based on UAV imagery for the first time. The model can be used to obtain weed maps in cereals fields known to be infested by perennial weeds. These maps can be used as basis for the generation of prescription maps for SSWM, either pre-harvest, post-harvest, or in the next crop, by applying herbicides or non-chemical measures.
Forfattere
Therese With BergeSammendrag
Det er ikke registrert sammendrag
Sammendrag
Det er ikke registrert sammendrag
Forfattere
Ran Nisim Lati Jesper Rasmussen Dionisio Andújar Jose Dorado Therese With Berge Christina Wellhausen Michael Pflanz Henning Nordmeyer Michael Schirrmann Hanan Eizenberg Paul Neve Rasmus Nyholm Jørgensen Svend ChristensenSammendrag
The adoption of site-specific weed management (SSWM) technologies by farmers is not aligned with the scientific achievements in this field. While scientists have demonstrated significant success in real-time weed identification, phenotyping and accurate weed mapping by using various sensors and platforms, the integration by farmers of SSWM and weed phenotyping tools into weed management protocols is limited. This gap was therefore a central topic of discussion at the most recent workshop of the SSWM Working Group arranged by the European Weed Research Society (EWRS). This insight paper aims to summarise the presentations and discussions of some of the workshop panels and to highlight different aspects of weed identification and spray application that were thought to hinder SSWM adoption. It also aims to share views and thoughts regarding steps that can be taken to facilitate future implementation of SSWM.
Forfattere
Trygve Utstumo Frode Urdal Anders Brevik Jarle Dørum Jan Netland Øyvind Overskeid Therese With Berge Jan Tommy GravdahlSammendrag
© 2018. This is the authors’ accepted and refereed manuscript to the article. Locked until 7.9.2020 due to copyright restrictions. This manuscript version is made available under the CC-BY-NC-ND 4.0 license http://creativecommons.org/licenses/by-nc-nd/4.0/
Forfattere
JC. Streibig J. Rasmussen D. Andùjar C. Andreasen Therese With Berge D. Chachalis T. Dittmann Gerhard Gerhardsen T. M. Giselsson P. Hamouz C. Jaeger-Hansen K. Jensen R.N. Jørgensen M. Keller M. Laursen H.S Midtiby J. Nielsen S. Muller H. Nordmeyer G. Peteinatos A Papadopoulos J. Svensgaard M. Weis S. ChristensenSammendrag
Det er ikke registrert sammendrag
Sammendrag
Arable weeds are generally distributed in patches, while herbicides are applied uniformly. Herbicides can be saved if only the patches are sprayed, i.e. patch spraying (PS). Bottlenecks for cost-effective PS are weed monitoring technology and valid technology-based decision rules for PS (thresholds). The novel machine vision algorithm Weedcer has been developed as an efficient weed monitoring tool for PS. Weedcer estimates the proportions of young weed leaves and cereal leaves in high resolution red–green–blue images. We conducted field trials to test relative weed cover (RWC) and relative mayweed cover (RMC) estimated by Weedcer as decision rules for PS. RWC is the total weed cover divided by the total plant cover and RMC is the mayweed cover divided by the total plant cover. The main criterion for evaluation and basis of these thresholds was the measured grain yield. Images (about 0.06-m2) were acquired with a GPS guided autonomous field robot in spring, the normal time for spraying seed-propagated broadleaf weeds in both winter – and spring cereals in Norway. Three map-based trials (weed monitoring and spraying in two separate operations) showed that mean RWC per management unit (12.0 × 12.5-m) was generally adequate. In winter wheat heavily infested with scentless mayweed (Tripleurospermum inodorum (L.) Sch.Bip.) and/or scented mayweed (Matricaria recutita L.), the mean RMC per management unit was more adequate. Progress during the project allowed three additional trials conducted in real-time (weed monitoring and spraying in the same operation). These were conducted with the robot in spring cereals, and showed that a weighted moving average of RWC per image was adequate. The sprayed and unsprayed management units in these trials were minimum 3.0 × 3.0-m and 0.5 × 3.0-m, respectively. Results indicated that the Weedcer-based thresholds should be lower in wheat (Triticum aestivum) than in barley (Hordeum vulgare).
Prosjekter

Divisjon for bioteknologi og plantehelse
SUSDOCK: Bærekraftig kontroll av høymole (Rumex spp.) i norsk grovfôrproduksjon – synergier mellom kartlegging og innovativ ugraskontroll
Både ett-, to- og flerårige ugrasarter kan være utfordringer i eng og beite, men ofte er de flerårige mest problematiske. De flerårige deles i to grupper, stedbundne (eks. høymole) og vandrende arter (eks. kveke). I eng og beite er det spesielt vanlig med de stedbundne artene og mange betrakter høymole som den mest problematiske.

Divisjon for matproduksjon og samfunn
PRESIS
I PRESIS, et seksårig samarbeidsprosjekt, jobbet NIBIO med å videreutvikle droneforskning for å fremme presisjonsjordbruk i Norge. Prosjektet leverer forskningsbaserte løsninger i praksis til gårdene gjennom en ny smart farming tjeneste: PRESISnet.

Divisjon for bioteknologi og plantehelse
SOLUTIONS: New solutions for potato canopy desiccation, control of weeds and runners in field strawberries & weed control in apple orchards
Efficient measures for weed control and similar challenges are vital to avoid crop loss in agriculture. National supply of food, feed and other agricultural products depends on each farmer’s success managing their fields and orchards. The recent loss of the herbicide diquat, and the potential ban on glyphosate, - both important tools for farmers -, raise a demand for new measures for vegetation control. Efficient alternatives to herbicides are also important tools in Integrated Pest Management (IPM). Norwegian growers need to document compliance to IPM since 2015 to ensure minimum hazards to health and environment from pesticide use.

Divisjon for bioteknologi og plantehelse
PresiHøstkorn: Redusert forbruk av ugrasmidler i korn - skadeterskler for presisjonssprøyting i høstkorn
Ugras er svært ofte flekkvis fordelt i åkeren. Korn er en konkurransesterk kultur og tåler en god del frøugras før det får negative konsekvenser. Det vil si at det eksisterer skadeterskler som angir hvor i åkeren ugrastiltak er nødvendig. Presisjonssprøyting (automatisk sensor-basert flekksprøyting) er å ta hensyn til den flekkvise utbredelsen av ugraset i åkeren. Dette vil redusere forbruket av ugrasmiddel betydelig i forhold til vanlig praksis (breisprøyting). På sikt forventes presisjonssprøyting å redusere forbruket av frøugrasmiddel med minst 50 %.

Divisjon for bioteknologi og plantehelse
VEGINN: Innovasjon for bedre ugresskontroll i grønnsaker



