Vitenskapelig artikkel –
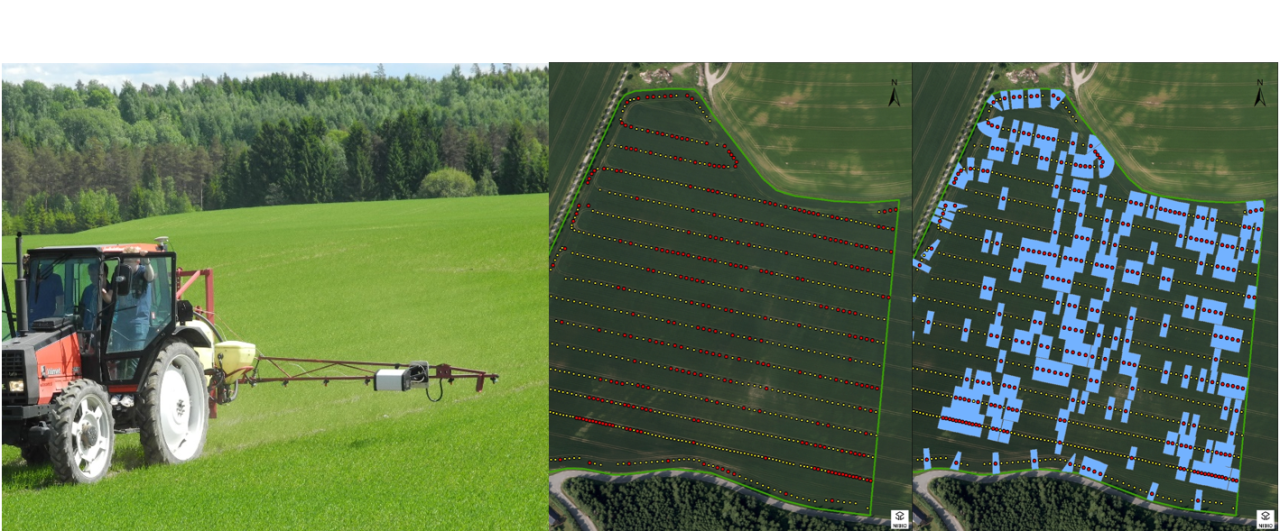
Sensor-based assessment of herbicide effects
JC. Streibig,
J. Rasmussen,
D. Andùjar,
...
Streibig, J., Rasmussen, J., Andùjar, D., Andreasen, C., Berge, T.W., Chachalis, D., Dittmann, T., Gerhardsen, G., Giselsson, T.M., Hamouz, P., Jaeger-Hansen, C., Jensen, K., Jørgensen, R., Keller, M., Laursen, M., Midtiby, H., Nielsen, J., Muller, S., Nordmeyer, H., Peteinatos, G., Papadopoulos, A., Svensgaard, J., Weis, M. & Christensen, S. 2014. Sensor-based assessment of herbicide effects (Vitenskapelig artikkel). Tilgjengelig fra: https://doi.org/10.1111/wre.12079.